This project was my master’s thesis back in 2016/2017. It is based on the i.MX6 quad Linux board from http://wandboard.org
The PCB contains multiple buttons and rotary knobs for intuitive handling of the XCsoar flight software. A STM32F4 microcontroller additionally handles the signal processing of the sensors on the PCB (GPS, 9 DOF IMU, 2x absolute pressure sensor + 2x differential pressure sensors for pitot tube, lightning detection).
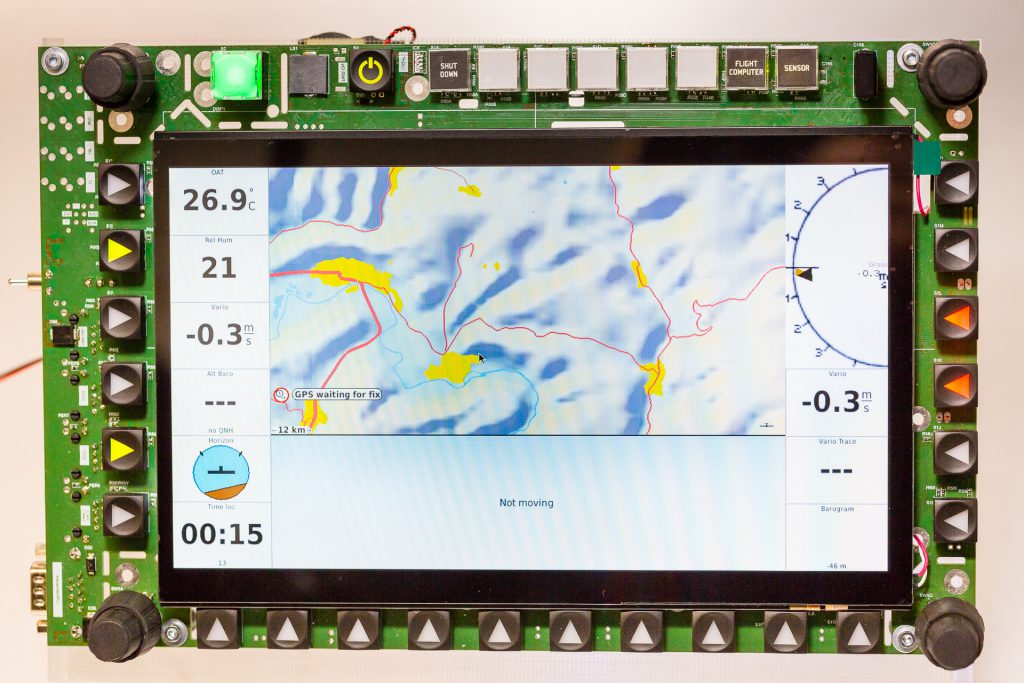
A high brightness (1000 nt) display is selected for proper visibility in heavy sunlight conditions. 1 nt= 1 Nit = 1 cd/m2